理想汽车昨天晚上提到的Street Gaussain 是什么?
为什么看上去一个非核心算法会拿出来专门讲解?
在理解这个之前我们先要知道,自动驾驶的开发并不是只有算法能力,也需要合适的工程配套。
其实一个非常重要的能力就是数据闭环, 这个并不是一个新词,但是之前大家考虑的都是,数据闭环可以用来训练,但是关于数据闭环用来测试这部分却着墨极少。
为什么?
因为实际上数据闭环测试需要极强的工程能力。
对于实车采集到的数据,假设是一个红绿灯路口,因为周围拥挤,车辆选择车道错误的bug。
我们都知道这种数据可能会被收集,然后回传云端,里面包含了所有的传感器信息和车辆状态信息。
为了解决这个问题,工程师可能做了一些优化。
现在需要考虑这个问题是否被解决。
那么之前的这些数据进入数据回灌系统, 一般车企称之为Logsim,还原当时的场景,测试到当时选择车道错误的前面几秒,然后看具体的时刻是否同样的问题被解决。
好的,如果这个问题不再出现,那么问题到此就结束了吗?
答案可能不是那么确定。
因为,这一时刻的车道选择问题被解决了之后,下一时刻会发生什么,数据里已经没有了。
也不再有新的数据了,因为此时的状态与道路上不一样了。
怎么办?
我们需要还原道路上的真实场景,也就是需要重建出当时道路上的状态。
怎么做?
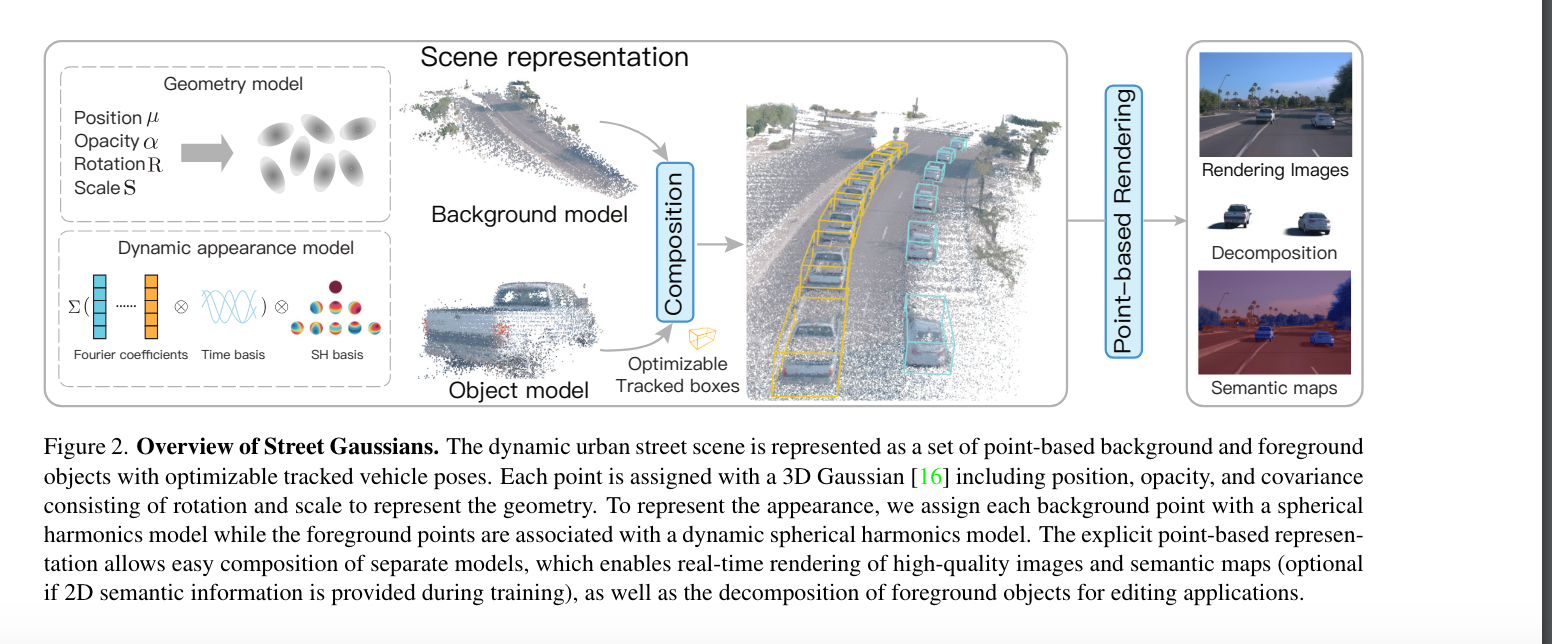
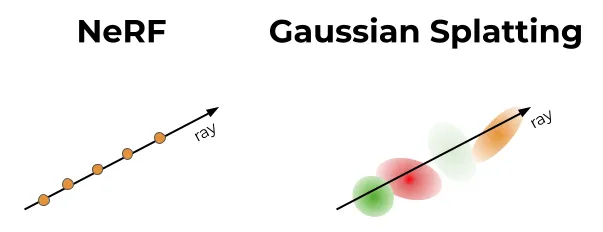
Tesla 之前使用NeRF(体素渲染), 基于视觉的体素重建工作,而理想这次选择了更加前沿的Gaussain Splattting(高斯泼溅,通过在三维空间中分布一系列高斯函数来表示场景,并使用点云渲染以实现高效的图像生成,后文称为GS),它解决了NeRF 难以实时渲染的问题,也就能做到实时测试。
而Street Guassian 就是GS 在自动驾驶领域的最佳范本,该成果将前景和背景分成相互独立的神经点云(neural point clouds),这样在应用的时候就可以实现场景的分解、组合以及编辑。
这样有了一个静态场景,在虚拟环境中,车辆的视角可以随时变化,就不再受限于当时的传感器数据,也就有了更好的测试自由度。
而且因为这种重建是基于车端数据的,可以将海量的的车端数据进行重建,进一步提高泛化性。
这种自动驾驶场景的重建与测试工程化,是非常需要魄力的。
因为GS 实际上表达有很多缺陷,例如对动目标不够稳定,车辆运动模糊带来的数据质量有问题,都需要工程上好好解决。
但是看上去理想汽车已经有了不错的结果。
在端到端自动驾驶工具链的探索,这对在端到端这条路上的玩家来说,非常有意义。
#理想汽车2024 智能驾驶夏季发布会#