魔女团新闻
首页
推荐
军事
NBA
体育
社会
明星八卦
娱乐
财经
科技
汽车
历史
国际
游戏
动漫
公益
搞笑
商业
互联网
数码
国际足球
健康
房产
家居
电影
星座
旅游
健身
时尚
科学探索
职场
育儿
股票
教育
影视
情感
热点
首页
教育
可变形地震搜救机器人设计
琢木的考研
2024-07-14 00:18:45
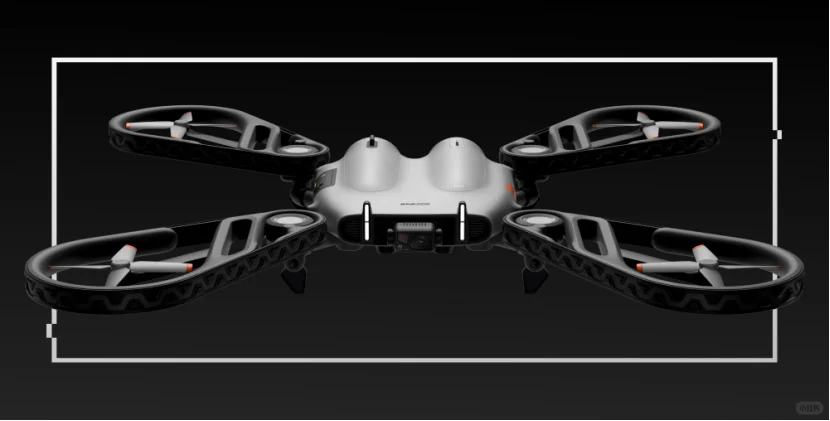
Savador——可变形地震搜救机器人设计 作者:洪思达 指导老师:夏芒 · 设计理念:地震灾区地形复杂,如何高效定位幸存者快速实施救援一直是研究热点。本课题提出新的创新设计思路,采用空-地一体化搜寻模式,通过可变形转化的四旋翼-摇臂行进结构赋予产品在地形复杂的地震灾区极强的人员搜寻能力,找到并接近受害者提供药品紧急救援,延长救援黄金期。同时通过精确定位和生命状况等信息进行灾区受害者紧急状况分析排序,引导救援人员实施救助。 · 素材分享~侵删,原作者可以——
0
阅读:0
琢木的考研
简介:感谢大家的关注
热门分类
推荐
军事
NBA
体育
社会
明星八卦
娱乐
财经
科技
汽车
历史
国际
游戏
动漫
公益
搞笑
商业
互联网
数码
国际足球
健康
房产
家居
电影
星座
旅游
健身
时尚
科学探索
职场
育儿
股票
教育
影视
情感
热点