随着OTA 6.0发布,理想向AD Max车主全量推送了基于基础导航地图信息的无图NOA。
这也让理想汽车继华为之后成为第二家全量交付城市导航辅助驾驶的车企。
不得不感慨理想强大的资源调度能力和团队执行力。
之前被调侃的智驾差生,秀了一波弯道超车
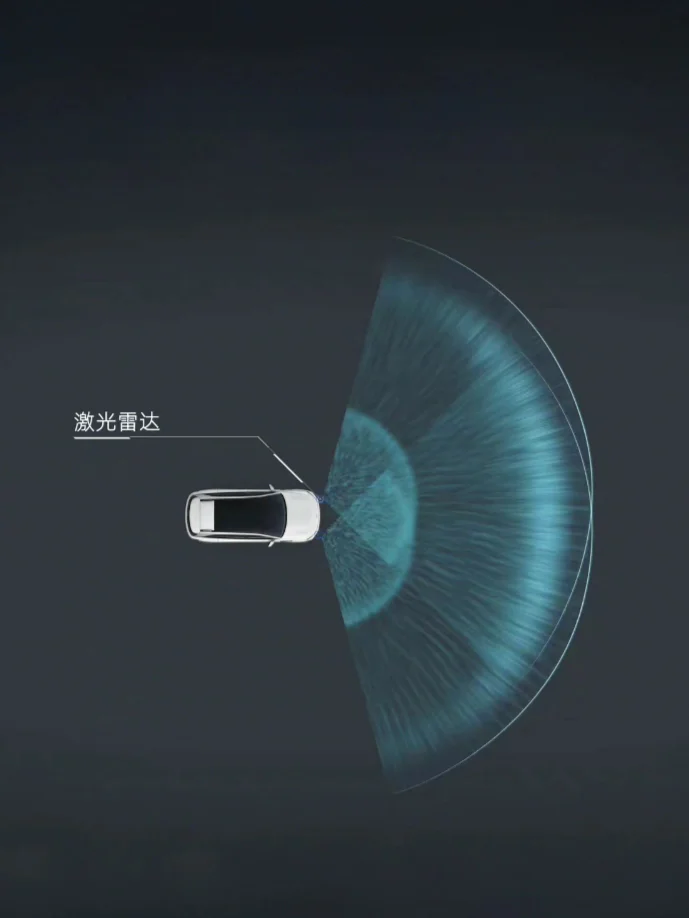
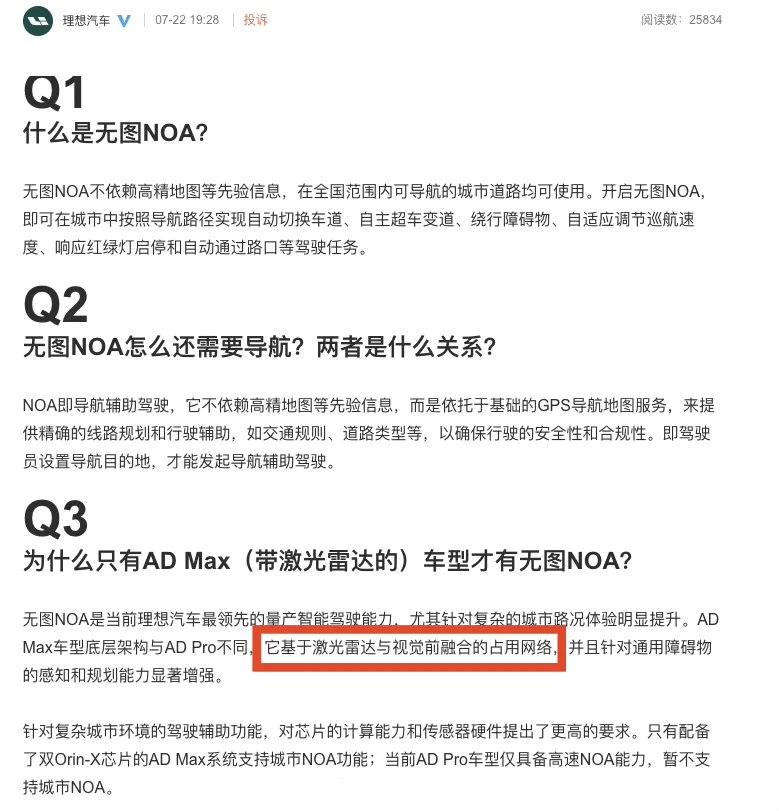
其中有一个技术细节大家可能没关注——理想智驾的感知架构从主视觉变成了视觉➕激光雷达前融合。
没记错的话,理想应该是继华为、飞凡之后第三家才用前融合的车企。
行业内大家都在去激光雷达的背景下,加大激光雷达的数据权重,也许值得大家思考。🤔
激光雷达真的没用吗,是没有用好还是不会用?
行业内不少做后融合的车企虽然头顶激光雷达,实际还是视觉为主或者全凭视觉,将激光雷达数据剥离出来,作为感知能力不足的补充,用于检验前段视觉网络的准确性。只有在视觉判断不准时调用激光雷达的点云数据做Double Check,在这样的技术架构下,Lidar价值度确实很低。
前融合则是在感知环节充分参考激光雷达给出的空间占用信息,雷达数据和视觉特征做充分融合感知,准确度和鲁棒性得到极大加强。
这也是华为的智驾和ADS主动安全一直做到遥遥领先很重要的一个原因,激光雷达自研且数据用的好。
视觉OCC(占用网络)是个很好的技术,理论上随着训练和算法迭代,确实可以实现空间任何非标准物体的立体感知,但是再牛的算法模型推理也不可能达到激光雷达点云真值测量的精准度,总有覆盖不到的Coner Case。
通俗一点理解,激光雷达点云能做到90分,占用网络可能还是80分,但占用网络砍掉了雷达成本,只需要摄像头和算法算力,背后是投入产出的逻辑。
所以千万不要觉得激光雷达没用,无论是感知还是补盲,它都有不可替代的作用,无非是汽车赌你大概率碰不到这样的极限场景,也希望各位永远不要碰到,随时做好接管。