近年来,人形机器人的研发领域经历了前所未有的飞速发展。自ASIMO问世以来,拥有双臂双腿、能够模拟人类行走与移动方式的人形机器人便成为了研究热点。
尤为引人注目的是,基于人体各部位肌腱驱动的肌肉骨骼人形机器人的研发活动亦异常活跃。这类机器人不仅在外形上贴近人体比例,更在关节结构、驱动系统及肌肉排列上深度模仿人体,可深入分析并实现人体的各种技巧性运动。众多研究聚焦于复制人体关节结构,如Asano等人对人体螺旋回家机构的复制及其运动实现的探讨,以及Sodeyama等人关于利用锁骨和肩胛骨设计上肢的研究,均体现了这一趋势。

然而,尽管研究众多,但针对人类特有的桡尺关节结构在人形机器人中的应用探讨却相对匮乏。人类前臂由桡骨和尺骨两块细长骨头构成,并通过复杂的轴关节实现旋转,这一独特结构在机器人设计中的再现面临诸多挑战。现有具备桡尺关节的类人机器人多采用气动执行器,虽便于布置但控制性欠佳,或无法满足前臂多自由度所需的肌肉配置。而传统肌肉模块虽在可维护性、可靠性及电机控制性方面表现出色,但其体积庞大且需额外结构支撑,难以在不破坏人体比例的前提下实现多自由度。
在此背景下,来自东京大学的研究人员为了根据人体的实际体型比例、体重比、肌肉排列及关节性能,开发一款能够充分发挥其优势的前臂,深入研究了带有桡尺关节的前臂开发,还积极探索如何巧妙利用这一结构实现复杂动作,并创新性地开发出一种新型微型骨骼肌肉模块,实现了肌肉与结构的完美融合。
借助这一突破性设计,研究团队成功打造了一款保持多自由度、兼具可维护性和可靠性的、模拟人体前臂的机器人,并首次实现了对人类精细动作的精准模仿,充分展现了桡尺结构的独特优势,填补了该领域的研究空白。
那么,该成果具体是如何实现的呢?接下来,和机器人大讲堂来一探究竟吧!
▍微型骨肌肉模块的开发
尽管研究团队此前已成功研发出多款肌腱驱动的肌肉骨骼人形机器人,如Kojiro、肯佐及拳四郎,但它们在实现桡尺关节、桡腕关节及指间关节的完整功能上仍有所欠缺,这主要归咎于肌肉排列的复杂性。
传统肌腱驱动的肌肉骨骼人形机器人在模拟人体前臂的精细结构和多自由度方面存在局限,主要源于肌肉排列和模块设计的挑战。因此,研究团队需要将肌肉模块小型化。为了完成这项任务,研究团队创新性地研发了一种新型微型骨骼肌肉模块。

新开发的微型骨肌肉模块的细节
制作策略该模块通过两种核心策略实现突破:
肌肉与骨骼的整合:该模块巧妙地将两个执行器融入设计之中,利用两电机间的空间布局,实现了肌肉执行器与骨骼结构的紧密集成,从而创造了紧凑且高效的构造,避免了传统设计中结构与肌肉模块的分离所带来的空间浪费。
微型马达的应用与散热创新:为追求模块的紧凑性,我们选用了小型电机作为动力源。同时,为解决微型电机易发热的问题,我们设计了一种通过传热片将肌肉产生的热量有效分散至结构中的散热机制,确保了模块在高扭矩输出下的持续稳定运行。

新开发的微型骨骼肌肉模块与传感器驱动集成肌肉模块的比较
通过上述策略,研究团队的微型骨骼肌肉模块不仅实现了对人体比例、体重比及肌肉排列的精准模拟,还通过简单的线性连接即可构建出复杂的桡尺结构,这些结构同时兼具肌肉与骨架的双重功能。同时保持了可维护性和可靠性。
模块设计在模块的具体设计上,研究团队注重细节优化。选用了无刷直流电机,并根据肌肉的实际需求精心调整了齿轮比。导线方面,采用了高强度的Dyneema线,并通过精密滑轮进行引导,以确保传输的稳定性和效率。张力测量单元则集成了多种高精度传感器,并配备了保护盖,从而显著提升了操作的稳定性。

新开发的骨骼肌肉模块的通用性。左:超微型张力测量单元的各种布置。右:肌肉模块的各种连接
尤为值得一提的是,研究团队还创新性地设计了“骨支撑”和“骨基”结构,使肌肉模块本身成为整体结构的一部分,不仅实现了纵向与横向的灵活连接,还有效减少了材料浪费,提升了结构的整体效能。

有无传热片时电机热量传递的比较。用新开发的微型骨骼肌肉模块举起 20 [kgf] 和 40 [kgf] 的重物
此外,该模块还具备高效的散热机制。通过“骨基”与两电机间的传热片设计,模块能够将产生的热量有效分散至整个结构中,确保即使在高齿轮比下也能维持连续的高肌肉张力,并实现反向驱动,大大提升了模块的耐用性和可靠性。

超微型张力测量装置的原理。左图为张力测量的原理。右图为校准结果
在张力测量技术方面,研究团队也取得了重大突破。他们研发出了一种超微型的张力测量装置,通过垂直排列称重传感器的方式,实现了空间的高效利用。相较于旧款装置,其体积减小了61%,尺寸仅为16×16×19[毫米^3],却能够测量高达56.5[kgf]的张力,展现了卓越的测量性能和紧凑的设计优势。
性能评估在性能评估方面,研究团队对新开发的微型骨骼肌肉模块进行了全面的性能评估。
与传统模块相比,尽管本研究模块内含两个执行器且电机尺寸与性能有所差异,但其仅导致21%的体积增加,同时增加了肌肉数量。该模块设计赋予机器人高设计自由度,超微型张力测量单元可灵活布置,模块间连接方式多样,充分利用了肌肉模块作为结构元素的优势。

悬垂的结果。左图:悬垂运动概览。右图:实验期间的肌肉张力和温度
实验证明,该装置能准确测量高达56.5[kgf]的肌肉张力,且通过有效散热设计显著抑制了温度上升,确保了持续的高肌肉张力输出。实际应用测试中,新开发的前臂成功应用于Kengoro机器人,实现了悬垂姿势的稳定悬挂,进一步验证了模块的强度与散热性能。
▍带桡尺关节的人体模拟前臂的开发
人类前臂由桡骨和尺骨构成,这两块骨头与位于近端和远端的两个轴关节共同组成了桡尺关节。该关节具有多个显著特征,包括尺骨固定时的活动能力、作为斜轴关节的特性,以及通过两块长骨分散扭转的能力。这些特征在人类执行精细动作时发挥着关键作用。

人类桡尺关节的结构
为了充分利用这些结构优势,研究团队采用了新开发的微型骨肌肉模块,成功研发了带有桡尺关节的人体模拟前臂。该前臂设计紧凑,充分利用了微型骨骼肌肉模块能够纵向和横向连接形成结构的优势。

新开发的Kengoro前臂的概述
桡骨和尺骨各配备两个模块,前臂共有4个模块,因此有8块肌肉,模拟了人类前臂的肌肉排列和自由度。在肌肉排列方面,研究团队精心模拟了人类前臂的8块肌肉,实现了包括桡尺关节、桡腕关节和手指在内的多个自由度。与其他机器人相比,这款前臂在紧凑性、肌肉数量和自由度表达方面均表现出显著优势。

新发育的前臂的肌肉排列
此外,研究团队成功模仿了人体的比例和体重比,使前臂更加符合人体工学。通过下表的数据展示,研究团队进一步验证了前臂在工作空间和最大扭矩方面的性能,证明了其基于人体的准确性和实用性。

人类与新开发前臂的 Kengoro 上肢连杆长度和重量的比较
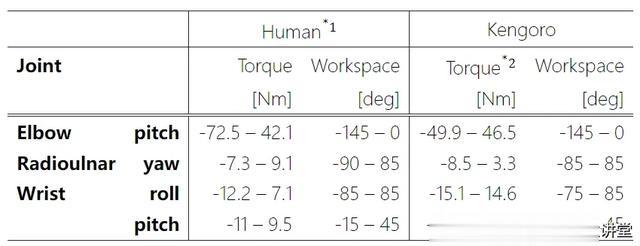
人类与 Kengoro 的关节表现比较
▍利用桡尺结构实现人体熟练动作
基于成功开发的与人体比例相符的桡尺结构,研究团队进一步探索了Kengoro如何利用这一独特结构执行各种人类特有的动作。通过一系列运动实验,团队评估了前臂的模仿程度,并验证了桡尺结构在多种任务中的优势。

Kengoro 的前臂,由新开发的微型骨骼肌肉模块组成
焊接在焊接任务中,Kengoro展示了即使在尺骨固定的情况下,桡尺关节仍能保持稳定的移动性,这一特性对于需要手部稳定运动的精细作业至关重要。它弥补了传统肌腱驱动型肌肉骨骼人形机器人在刚性较低时无法进行精细运动的不足。

Kengoro 焊接。使用烙铁的 Kengoro 可以将尺骨固定在桌子上,从而移动桡尺关节
打开书本在打开书本的动作中,Kengoro通过旋转桡尺关节实现了类似转动手掌的动作,这得益于桡尺关节轴的倾斜设计。这种设计不仅扩大了手部的活动范围,还结合了桡尺关节在尺骨附着状态下也能活动的优点,使得手部能够大范围且稳定地活动。

Kengoro 打开一本书

斜桡尺关节与普通直桡尺关节手掌中心可达点对比。左:xy平面。右:yz平面
拧螺丝在拧螺丝的任务中,Kengoro通过使桡尺关节轴与螺丝刀轴一致,高效地传递了扭矩,展示了桡尺结构在需要扭矩传递的任务中的有效性。

Kengoro 用螺丝刀拧螺丝。上图显示桡尺关节轴与螺丝刀轴相吻合
挥羽毛球拍在羽毛球挥拍动作中,Kengoro利用倾斜的桡尺关节增加了球拍头的旋转半径和速度。与普通的直桡尺关节相比,倾斜设计显著提高了挥拍速度,尽管提升幅度不大,但在竞技体育中,正确熟练地使用桡尺关节对于提高挥拍速度具有重要意义。
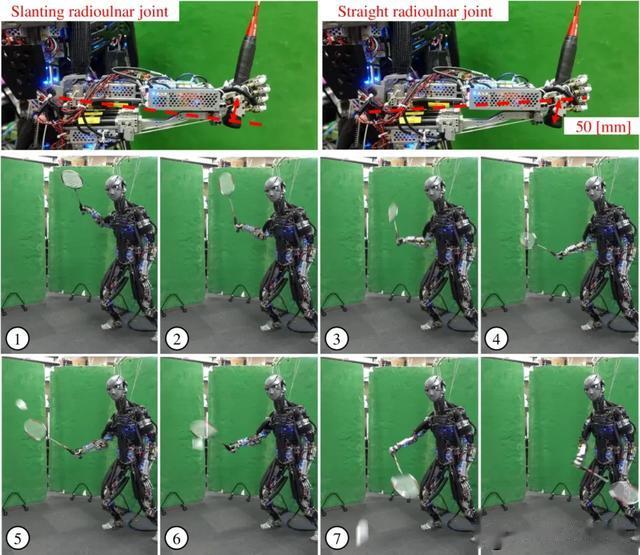
羽毛球挥拍动作。上图为球拍旋转半径较大的斜桡尺结构与球拍旋转半径较小的普通直桡尺结构的比较

羽毛球挥拍运动的关节角速度
通过一系列实验,研究团队验证了桡尺结构在多种人体熟练动作中的重要作用,展示了其在提高手部稳定性、活动范围、扭矩传递以及挥拍速度等方面的优势。
参考文章:https://arxiv.org/html/2408.09934v1
