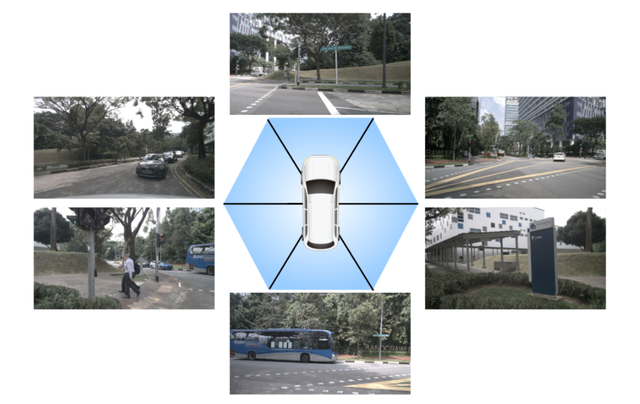
首先,自动驾驶的车子得先能“看”清楚周围都有啥。这就需要用到车上的那些摄像头、激光雷达之类的玩意儿。它们就像是车子的眼睛和耳朵,能帮车子捕捉到路上的各种情况,比如别的车啊、行人啊、交通标志啊这些。然后,这些信息就会被收集起来,告诉车子周围都发生了什么。所以,我们把这些能帮车子“看”和“听”的东西叫做感知端。

接下来,车子得知道怎么走。这就是控制端的事儿了。车子收集到周围环境的信息后,得做出决策,比如什么时候该加速、减速,怎么避开障碍物。这就像是车子的大脑,得根据眼睛和耳朵提供的信息来决定下一步怎么走。
你以前这就是端对端了嘛,其实上述这些可以说是以前的架构,自动驾驶的技术是分成三个独立的部分:感知、决策和控制。感知就是收集信息,决策就是根据信息做决定,控制就是执行这些决定。这三个部分之间得用特定的方式交流,有点像是它们之间有固定的语言,处理起来比较死板。特别是决策部分,得靠工程师提前设定好规则,如果遇到没设定过的情况,就可能出问题。而且,信息在这三个部分之间传递的时候,可能会有延迟,有时候信息还会丢失,这就不太安全。

那为什么各大厂商对它趋之若鹜?
那就是现在,端到端的技术就是把这三个部分合并起来,让它们变成一个整体。这样,工程师就不需要再设定那么多规则了,而是让系统通过学习大量的驾驶数据,自己去找开车的规律。这样,车子就能更灵活,更像真人开车一样,能快速找到最合适的应对方法。

端到端自动驾驶,就是把车上的传感器收集到的所有信息一股脑儿扔进一个超级大脑里,然后这个大脑直接告诉车怎么开。这样一来,整个系统就只盯着一个目标:让车开得又好又安全。不像以前,自动驾驶得分成好几个步骤,每个步骤都有自己的小目标,现在就只有一个大目标。

跟以前的自动驾驶比,端到端的系统就像是把好几个小团队合并成一个大团队,这样信息传递更快,计算也更高效。而且,因为少了人为设定的规则,端到端的系统能更好地理解路上的各种情况,比如怎么避开障碍物,怎么规划路线,这些都更接近真人开车的方式。

端到端的系统还有个好处,就是维护起来更简单。因为大部分工作都是数据驱动的,所以不需要那么多人为干预。研发人员只需要关注一个模型,就能提升整个系统的性能。
车厂也都紧跟科技趋势,比如从2023年下半年开始,蔚来汽车做了个大动作,他们把原来负责感知和规控的模型部门合并,成立了一个新的部门,叫做大模型部。这个部门的使命就是专门研发端到端的自动驾驶模型,也就是那种能直接从传感器数据生成驾驶指令的模型。他们还推出了一些基于这种端到端模型的主动安全功能,这些功能能帮车更好地避免事故。

现在,蔚来自动驾驶的业务主要分成两大块:一块是“云”,就是大模型部,另一块是“车”,就是负责在车上部署这些模型的部门。他们不再像以前那样,按照功能模块(比如感知、地图、数据、规控等)来划分部门,而是把重点放在了“云”和“车”这两个大的环节上。