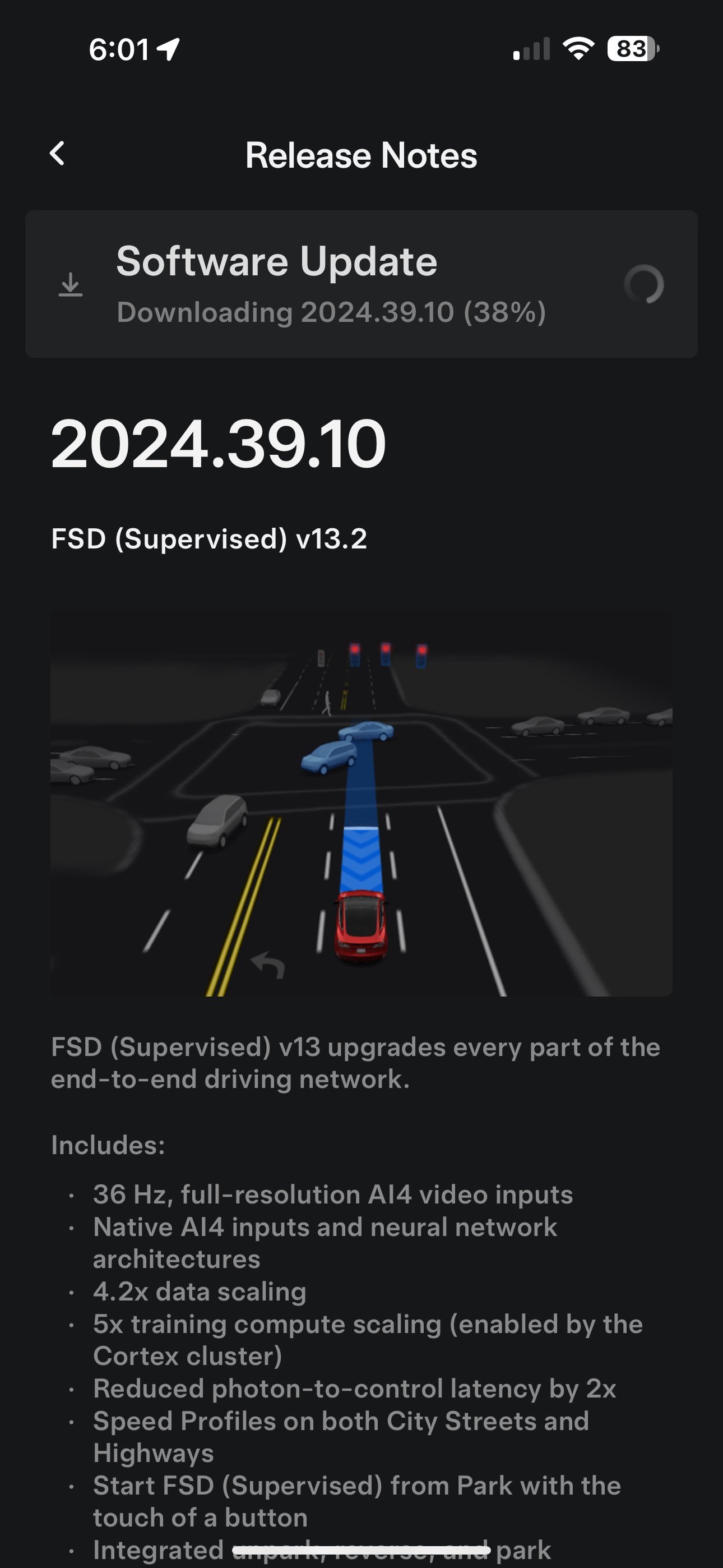
终于,特斯拉开始面向外部用户推送 FSD v13,第一个版本为 v13.2。特斯拉 Autopilot 工程师证实,除了更新日志中提到的,FSD v13 支持 Park 2 Park,也就是我们国内说的车位到车位。
更新日志如下:
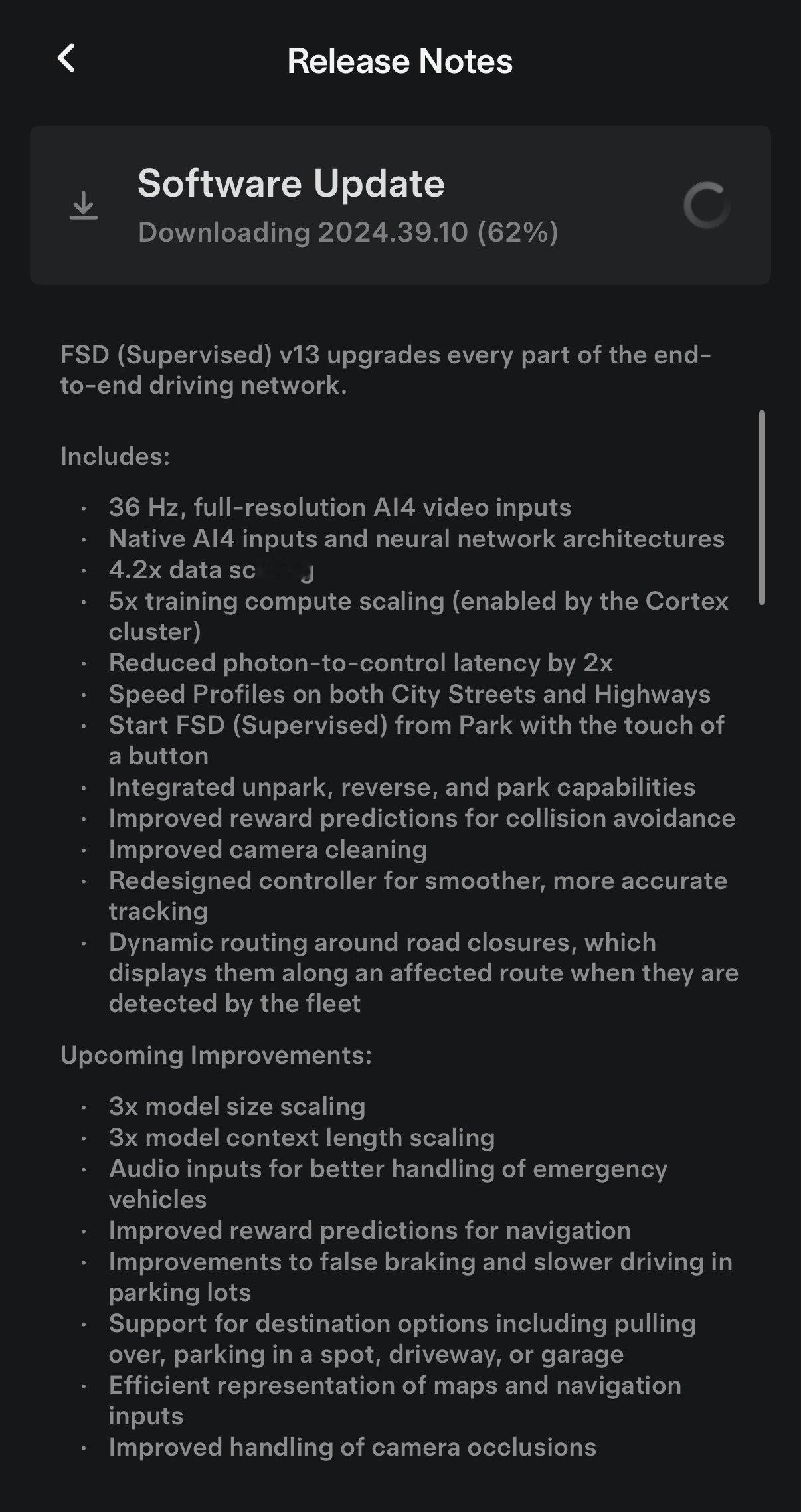
- 36 Hz 全分辨率 AI4 视频输入
- 原生 AI4 输入和神经网络架构
- 4.2 倍数据集扩展
- 5 倍训练算力扩展(由特斯拉 Cortex 集群支持)
- 将光子到控制的延迟减少到原先的 1/2
- 在城市街道和高速公路上启用新的速度配置文件
- 一键启动 FSD
- 集成了召唤、倒车和停车功能
- 提高了碰撞规避的奖励预测
- 改进了摄像头清洁
- 重新设计了控制器,使其更加平滑和准确地跟踪
- 动态绕过道路封闭区域,并在车队检测到的情况下在受影响的路线中显示这些信息
即将改进:
- 模型规模扩展 3 倍
- 模型上下文长度扩展 3 倍
- 音频输入,用于更好地处理警车车辆
- 改进导航的奖励预测
- 改进误刹和停车场中低速行驶的问题
- 支持目的地选项,包括路边停车、泊车入位、进入车道或车库
- 提高地图和导航输入的高效表示
- 改善摄像头遮挡问题的处理
特斯拉 Autopilot 工程师 Yun-Ta Tsai 证实,这是特斯拉自 4 年前不经过 ISP 直接光子计数以来对 FSD 最大的一次重构。
特斯拉重构了整个系统,数据、视觉、编译器、系统、固件、UI、QA、PM…全员参与推动的重构。